

| HS-WIM | ||||||||||||||||||||||||||||||||||
| 01. 기존 HS-WIM 센서의 특성 : 압전 센서 | ||||||||||||||||||||||||||||||||||
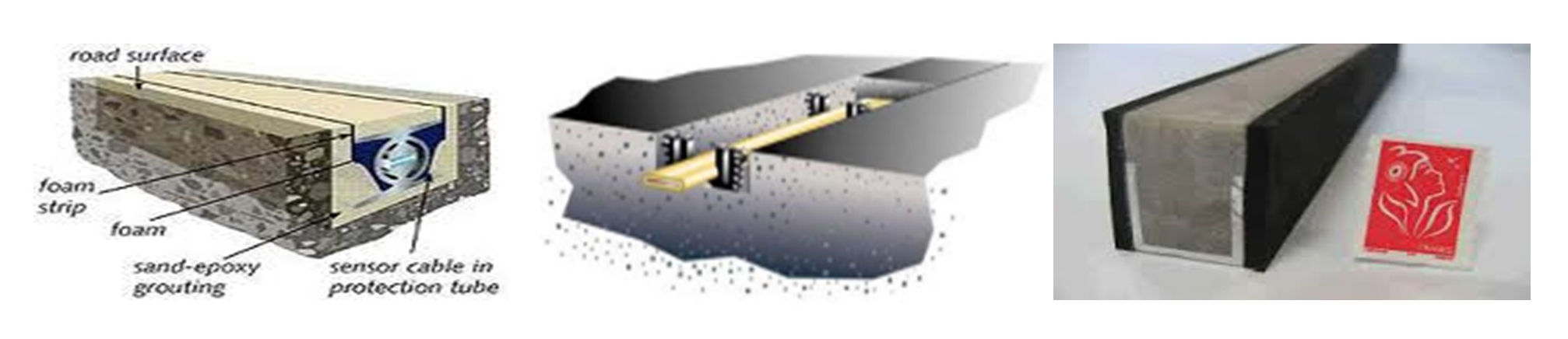
| 압전 재료는 기계적 충격이나 진동을 받을 때 전압을 생성하는데, 반대 극성의 전기 전하가 재료의 내부 및 외부 면에 나타나고 전압을 유도함 | ||||||||||||||||||||||||||||||||||
| 측정된 전압은 차량의 힘 또는 중량에 비례하며, 압전 효과의 크기는 결정체 축에 대응하여 힘의 방향에 따라 달라짐 | ||||||||||||||||||||||||||||||||||
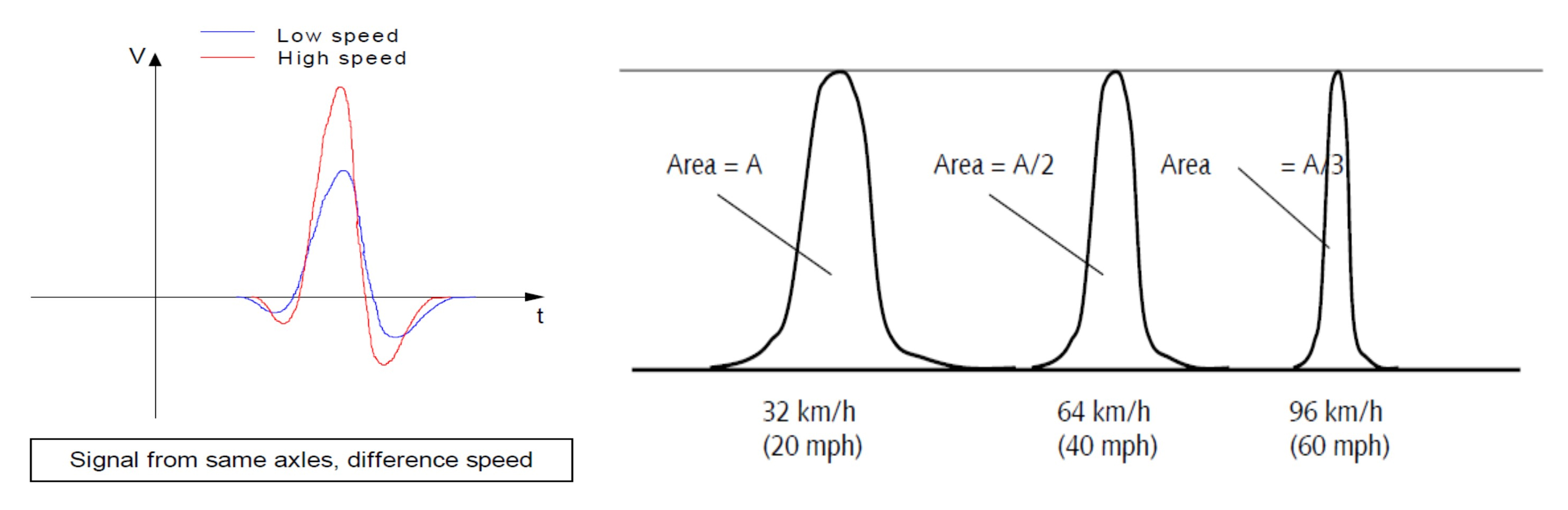
| 압전 효과는 동적이기 때문에, 즉 힘이 변화 할 때에만 전하가 생성되고 힘이 일정하게 유지되면 초기 전하는 감쇠하게 되며, | ||||||||||||||||||||||||||||||||||
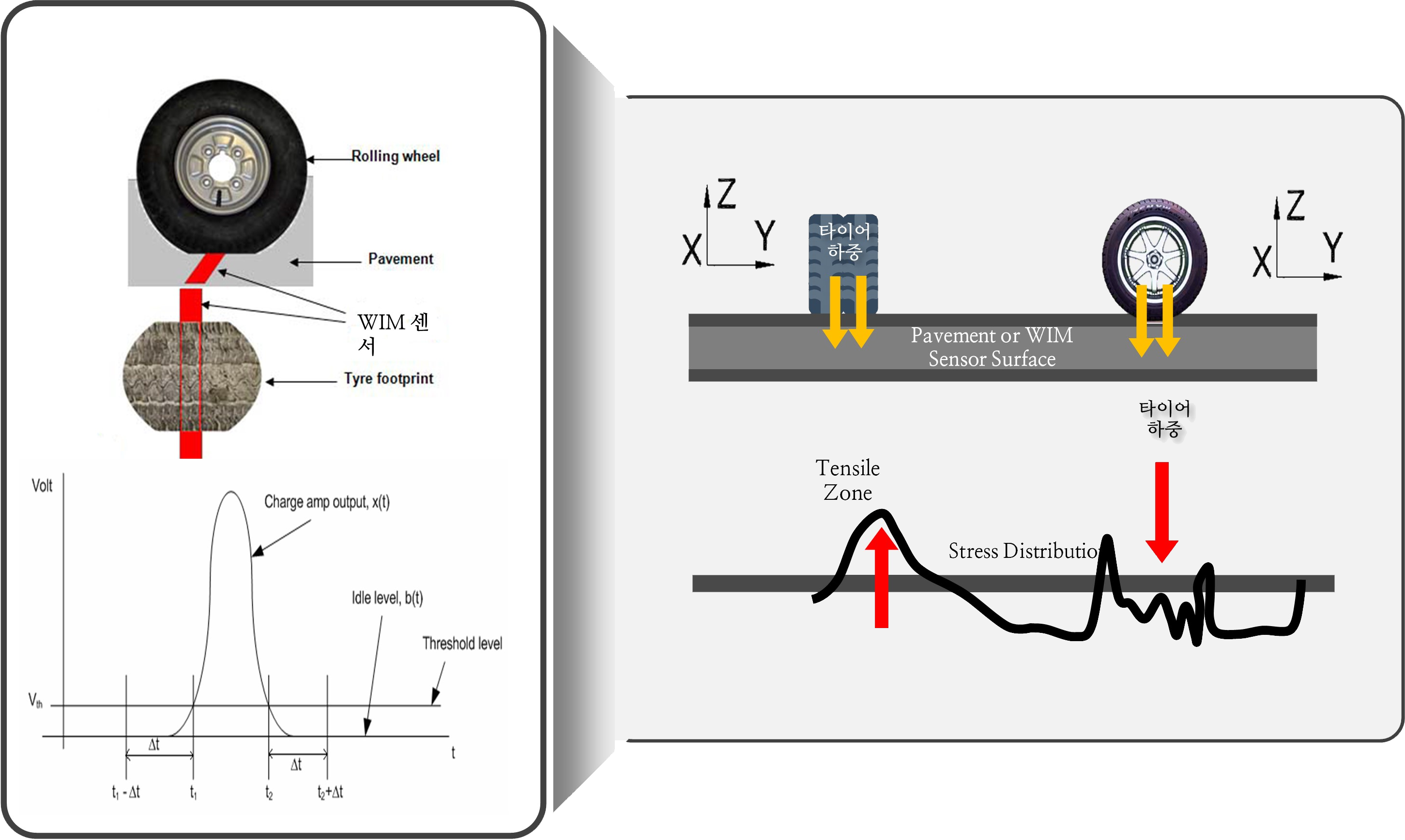
| 압전 재료는 높은 주파수 응답으로 비교적 동적인 하중변화는 측정이 잘 되나, Hysteresis의 물성적 특성으로 정적인 하중 측정에는 어려움이 있음 | ||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||
| 02. 기존 HS-WIM 센서의 한계 | ||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||
출처 : Xiaohua Jiang et al. Improvements in Piezoelectric Sensors and WIM Data Collection Technology, Annual Conference of the Transportation Association of Conada 2009 |
||||||||||||||||||||||||||||||||||
| 이론적인 측면의 이슈 | ||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||
| LS-WIM | ||||||||||||||||||||||||||||||||||
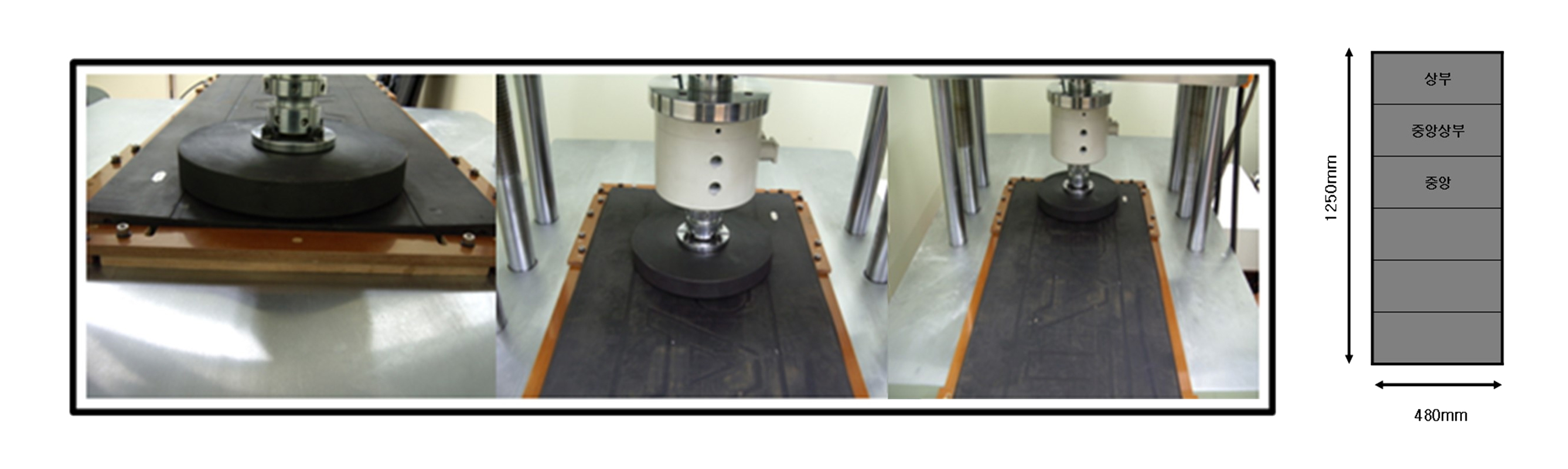
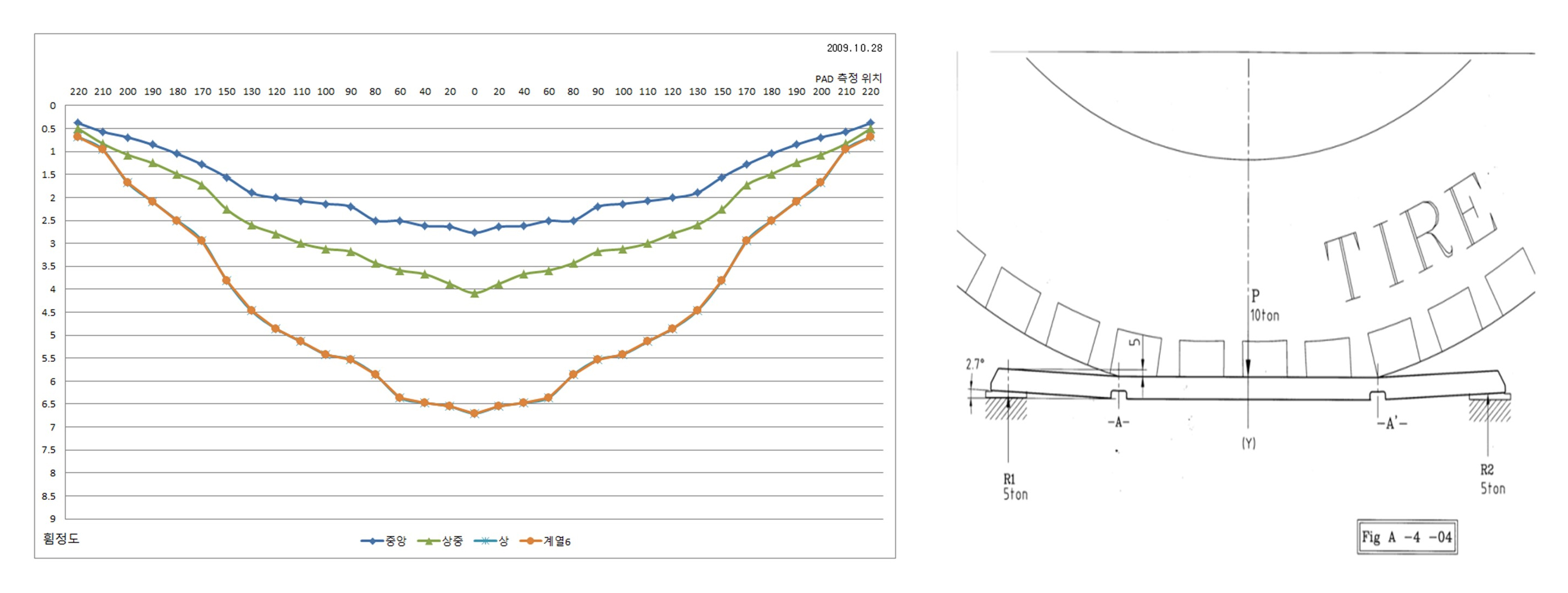
| 01. LS-WIM 센서의 편하중 현상 | ||||||||||||||||||||||||||||||||||
| 교정검사장비로 축중기 PAD 상/중/하 테스트 사진 | ||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||
| 080125 10t 중량에 따른 휘어짐 | ||||||||||||||||||||||||||||||||||
| PAD 가운데가 적게 휘어짐(중량이 적게 검출됨) | ||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||
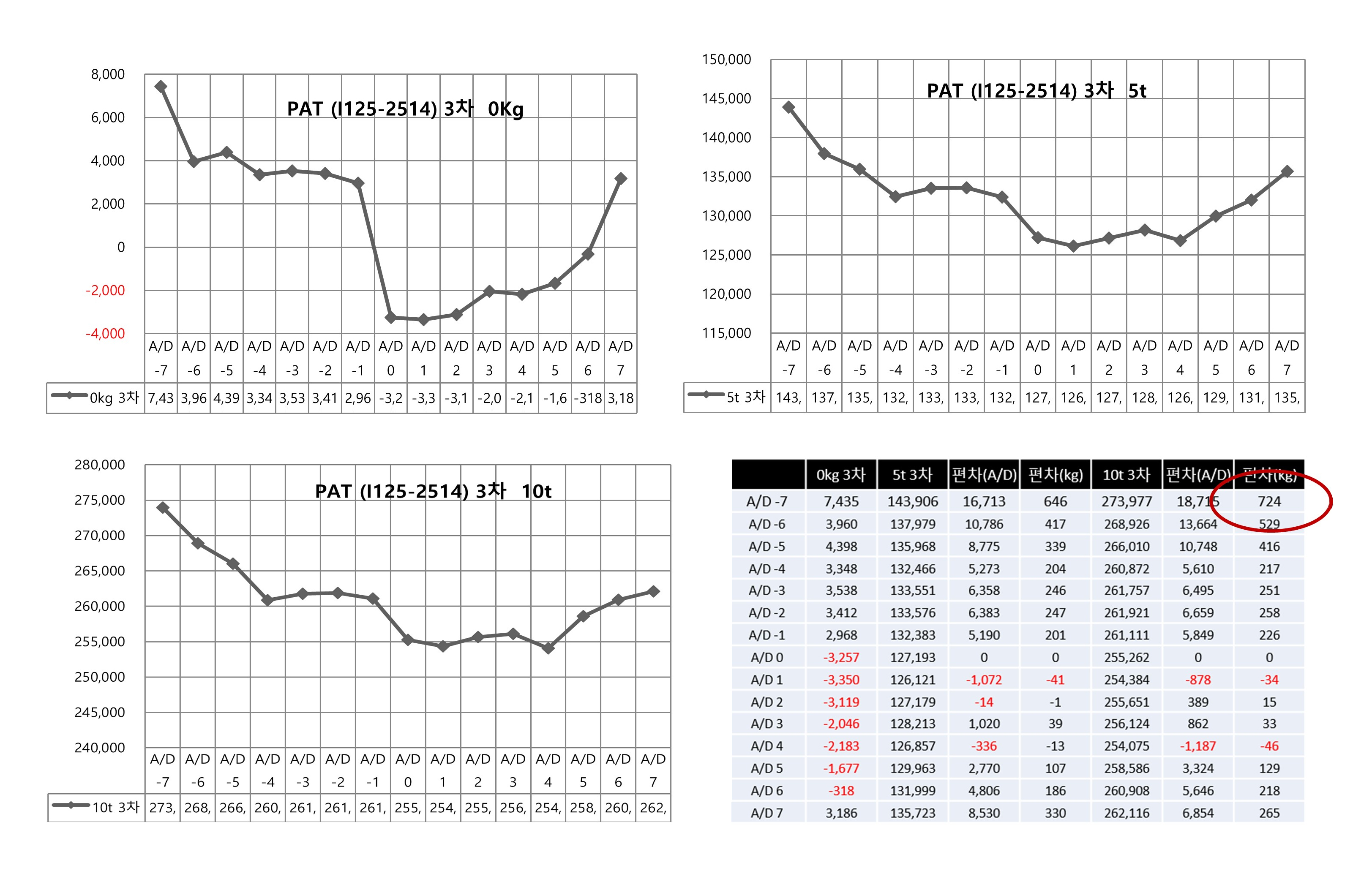
| 02. LS-WIM 센서의 복원력 | ||||||||||||||||||||||||||||||||||
| PAD에 무게 값을 연속(0~5~10ton)으로 가하여 PAD의 복원력이 떨어져 초기 시작하는 영점 Analog 값이 달라지는 현상이 발생됨으로 타이어 무게 값도 달라지는 요인으로 작용 | ||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||
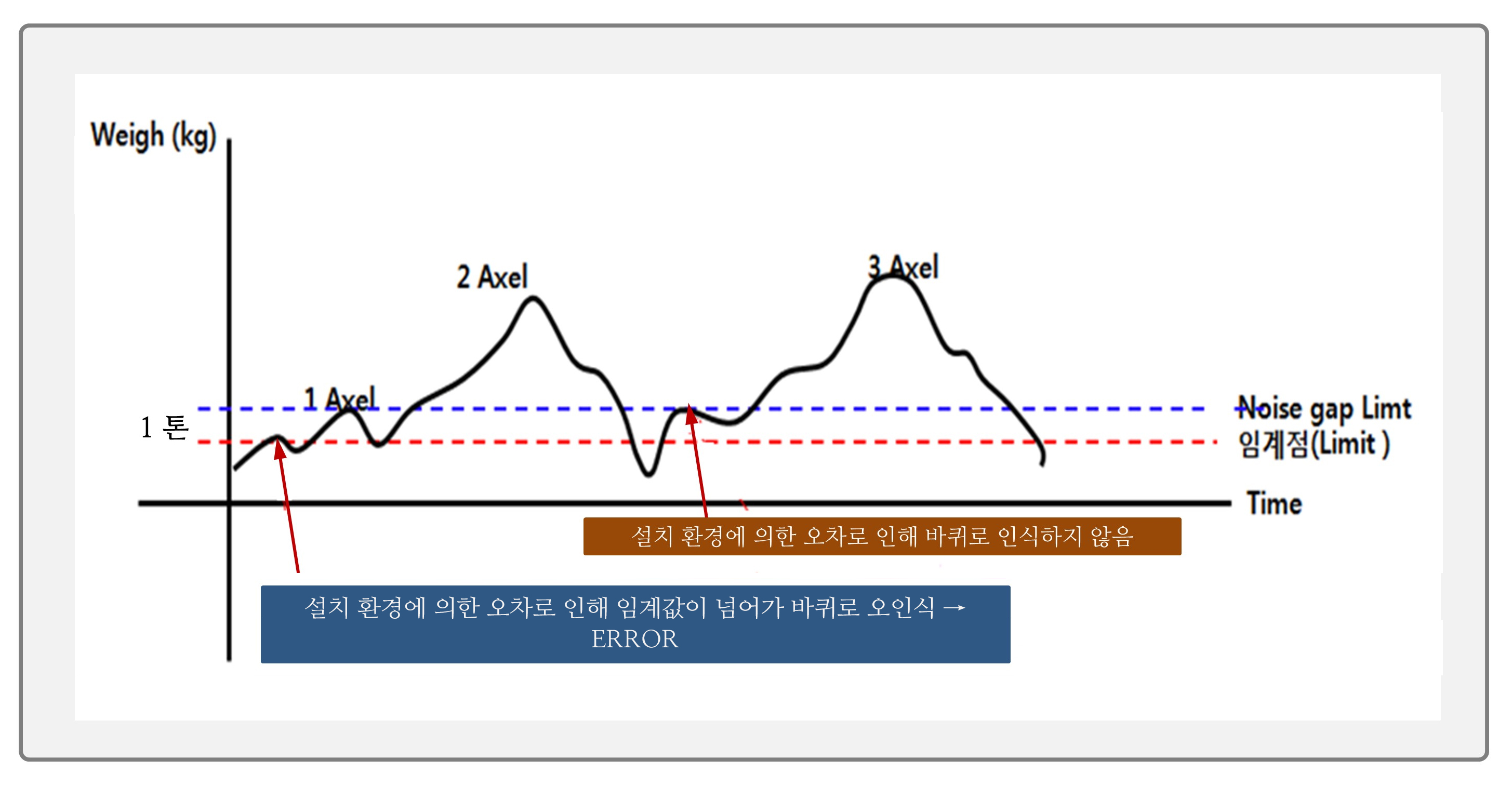
| 03. 센서의 임계치 및 노이즈 갭 | ||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||

서울시 동대문구 왕산로 9길 8 (주)WIZWIG
070-5129-2979 FAX. 070-000-0000
ⓒ WIZWIG CORPORATION. ALL RIGHTS RESERVED